آموزش ربات به منظور تشخیص محدودیتها برای انجام ایمن وظایف باز
آموزش محدودیتهای ربات برای انجام وظایف باز
زمانی که کسی به شما میگوید “محدودیتهای خود را بشناسید”، به احتمال زیاد منظورش این است که باید در کارهایی مانند ورزش متعادل باشید. اما برای یک ربات، این شعار به معنای یادگیری محدودیتها و انجام کارها بهطور ایمن و صحیح است.
چالشهای ربات ها در انجام وظایف
فرض کنید از یک ربات میخواهید که آشپزخانه شما را تمیز کند، اما این ربات با فیزیک محیط اطرافش آشنا نیست. چطور میتواند یک برنامه چند مرحلهای کاربردی برای پاکسازی ارائه کند؟ مدلهای زبانی بزرگ (LLMs) میتوانند به آن نزدیک شوند، اما اگر فقط بر اساس متن آموزش دیده باشند، ممکن است نکات کلیدی درباره محدودیتهای فیزیکی ربات را از دست بدهند.
روشهای جدید MIT
محققان آزمایشگاه علوم کامپیوتر و هوش مصنوعی MIT (CSAIL) از مدلهای دیداری برای شناسایی محیط و محدودیتهای ربات استفاده کردند. راهکار آنها شامل طراحی یک برنامه توسط LLM است که در یک شبیهساز بررسی میشود تا اطمینان حاصل شود که امن و واقعگرایانه است. اگر این برنامه قابل اجرا نباشد، مدل زبانی یک برنامه جدید تولید میکند تا به یک برنامه قابل اجرا برسد.
نتایج و کاربردها
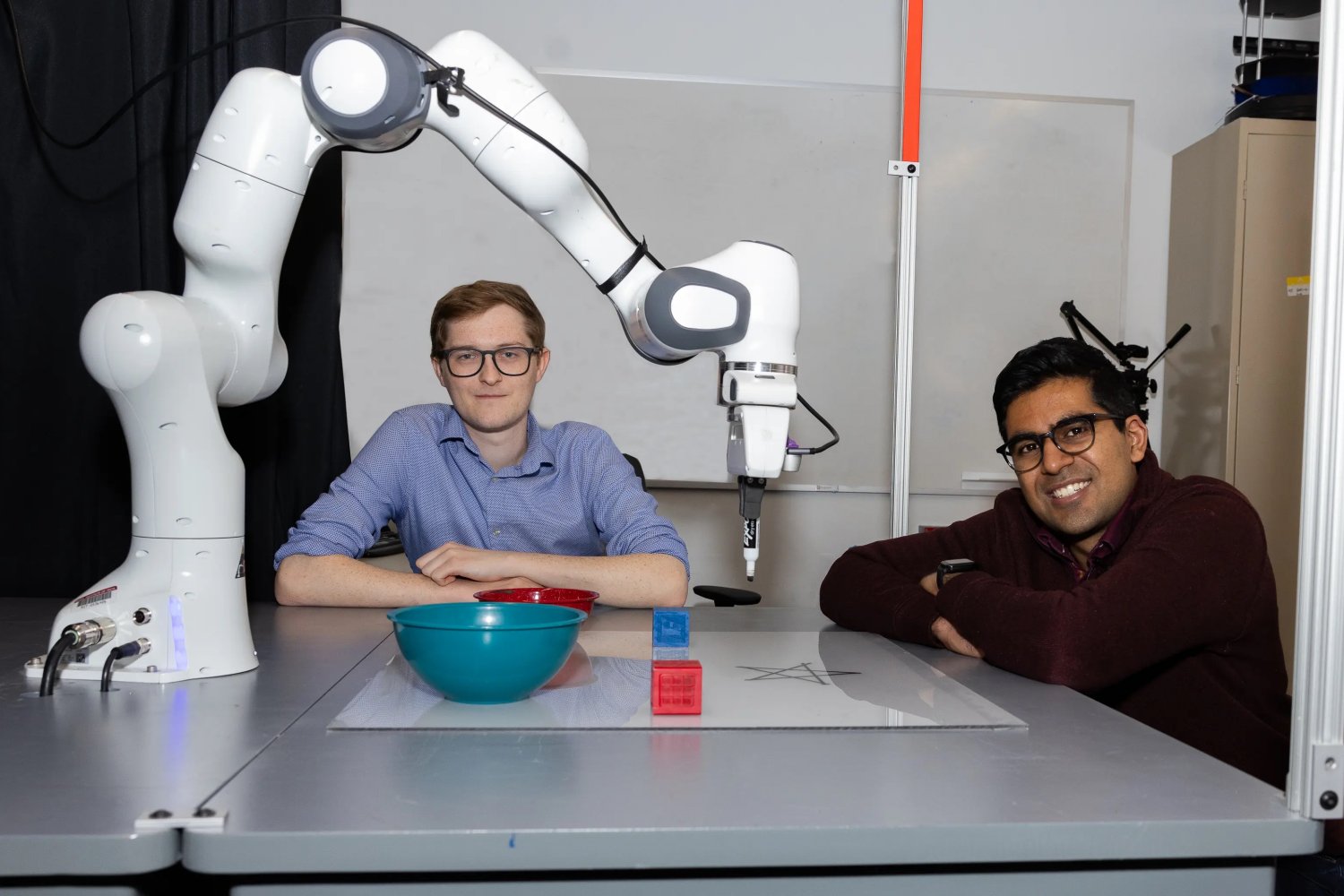
روش مورد استفاده در PRoC3S به رباتها این امکان را میدهد تا کارهای متنوعی نظیر نوشتن نامههای فردی، کشیدن ستاره و مرتبسازی بلوکها را انجام دهند. محققان امیدوارند که PRoC3S در آینده به رباتها کمک کند تا کارهای پیچیدهتری را در محیطهای داینامیک و متغیر مثل خانهها انجام دهند.
آزمایشهای عملی
در شبیهسازیها، PRoC3S موفق به کشیدن ستاره و حروف بهطور میانگین ۸ از ۱۰ بار شد. این روش همچنین در دنیای واقعی بر روی یک بازوی رباتیک عملیاتی شد و به آن یاد داد تا بلوکها را در خطوط مستقیم قرار دهد.
محققان انتظار دارند که این رویکرد به رباتها کمک کند تا تقاضاهای عمومی مانند “برای من چیپس بیار” را بهطور قابل اعتماد اجرا کنند. PRoC3S میتواند به ربات کمک کند تا در یک محیط دیجیتال مشابه، برنامهها را آزمایش کند و بهترین اقدام را پیدا کند.
چشمانداز آینده
محققان به دنبال بهبود نتایج با استفاده از شبیهساز فیزیک پیشرفتهتر و گسترش به وظایف پیچیدهتر هستند. آنها همچنین قصد دارند PRoC3S را به رباتهای متحرکی مانند رباتهای چهارپای استفاده کنند.
نتایج این پژوهش نشان میدهند که مدلهای زبانی میتوانند برنامههای ایمنتری برای رباتها توسعه دهند. ترکیب روشهای برنامهریزی و دادهمحور ممکن است کلید توسعه رباتهایی باشد که قادر به انجام کارهای بیشتری نسبت به حال حاضر هستند.
منبع: news.mit.edu

